
避障、测距常用传感器之一。传感器安装在机器人上时距离地面不能太近,太近容易产生干扰信号, 而且容易将可以翻越的障碍物当成无法逾越的障碍物。 传感器两探头间的距离不能太远也不能太近,太远测量误差过大, 太近串扰信号过强。
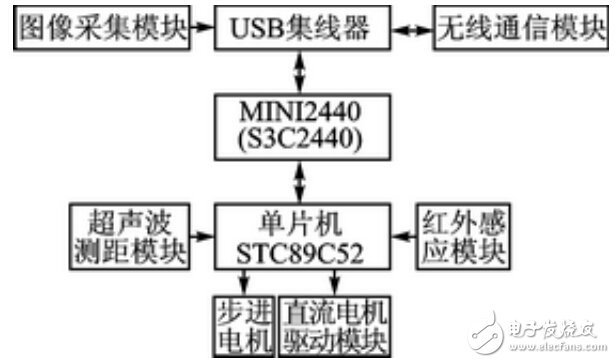
机器人硬件系统主要包括:ARM处理器、单片机、外围接口电路、机器人底盘以及电源等,其中ARM处理器是上层的核心,51单片机是下层的核心。硬件结构框图如图1所示。
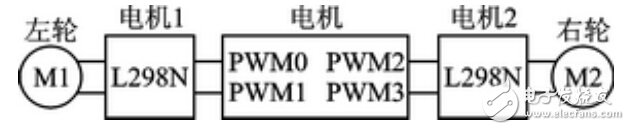
电机共有4路PWM输出分别作为左右轮的驱动,而通过2路PWM输出可控制一个电机,两个电机以并联方式连接。
当L298N芯片使能信号ENABLE为高时,输出才随输入变化,否则为高阻态,所以焊接时,ENABLE引脚及电源引脚VS均接电源VCC。
具体驱动过程为:通过编程由控制芯片经PWM发出驱动信号,PWM输出作为L298N的输入,经L298N转换输出控制信号使电机转动,从而实现电动机的驱动。
PWM输出信号的高低则可以控制直流电机转速。当占空比加大时,转速升高;占空比减小时,转速降低;当PWM信号输出占空比为0时可控制电机的停止。
当左轮停止,右轮转时,小车左转;当右轮停止,左轮转动时,小车右转。而2路PWM输出的正负顺序转换则可控制电机的正反转,进而控制小车的前进和后退。
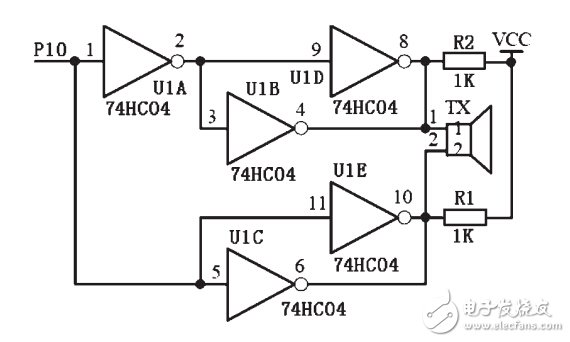
外加信号频率等于两压电晶片的固有振动频率时, 将会发生共振, 课题中采用的传感器中心频率为40kHz, 因此在发射电路中, 通过软件编程方式, 对单片机I/O口置高和置低, 产生40kHz脉冲信号, 输出到发射电路中。 由于AT89S51单片机I/O口使用时能提供20mA灌电流能力, 而吸电流能力较小, 所以用74HC04来提高其输出电流的能力, 保证40kHz的脉冲信号有一定的功率。 发射模块原理图如图4所示。
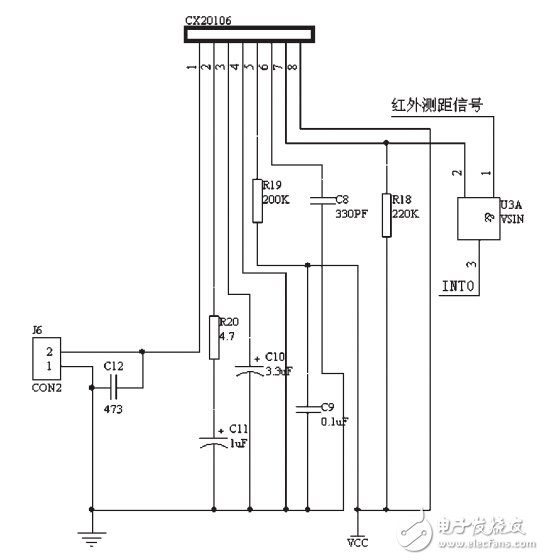
如图5所示, 接收处理电路采用集成电路CX20106. CX20106接收到与其中心频率相符的信号时, 7脚就输出低电平。 7脚输出的脉冲下降沿和红外传感器测距信号相与后接单片机中断口。
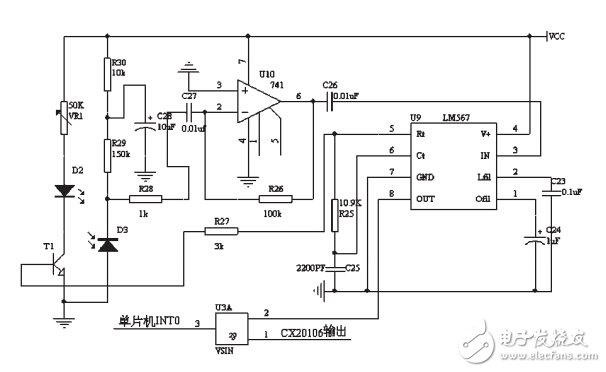
红外测距电路如图6所示, LM567可以构成低频振荡器作为红外传感系统的编码电路, 即利用其内部的压控振荡器来产生低频信号, 由于R25=10.9k, C25=2200pF, 根据公式f0 =1/1.1RC,5脚输出频率38.91kHz的脉冲信号。 此脉冲信号使三极管T1(8050)工作于开关状态, 驱动红外发光二极管发出的红外脉冲。 采用这种方法省去了信号发生电路, 简化了线路和调试工作, 又防止了周围环境变化和元件参数变化对收发频率造成的差异, 实现了红外线发射与接收工作频率的同步自动跟踪, 使电路的稳定性和抗干扰能力大大加强。
编辑点评:文章利用传感器与红外传感器各自的优点,设计了基于传感器和红外传感器的移动机器人感测系统。该系统采用红外传感器补偿了传感器的检测盲区,使移动机器人具有更大的感测范围。
备案号:粤ICP备19039425号 m6米乐平台注册-米乐m6官网登录入口-m6米乐手机网页版登录欢迎来电咨询!

